COLOMBO
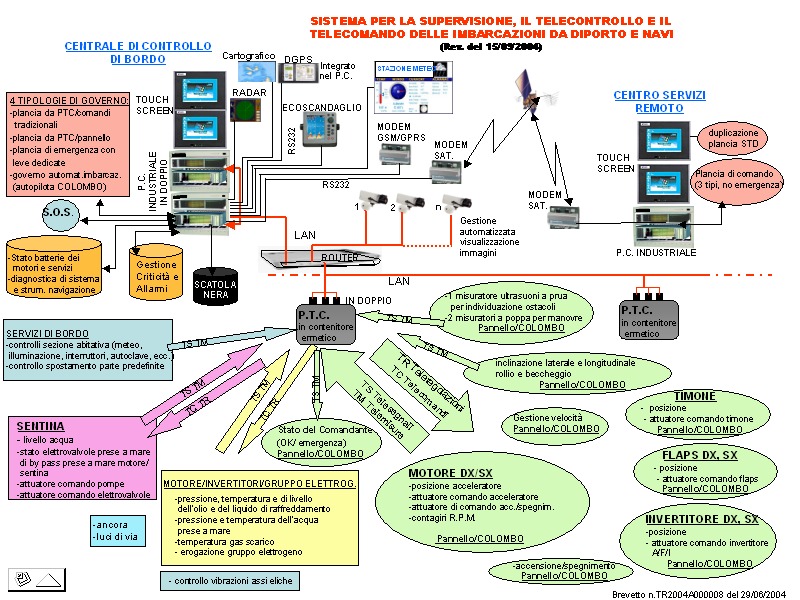
Sistema per la Supervisione, il Telecontrollo e il Telecomando delle imbarcazioni da diporto e delle navi.
Colombo è coperto da BREVETTO N. TR2004A000008.
DESCRIZIONE
Il sistema Colombo realizza la totale automazione delle funzioni di bordo compresa la conduzione automatica – autopilota intelligente – con la possibilità di cedere il comando ad un centro remoto. Il sistema nasce dall’idea di applicare i principi di automazione, telecontrollo e telecomando alla gestione totale ed integrata, compresa la conduzione, di imbarcazioni da diporto e navi per elevare la sicurezza e l’ottimizzazione della navigazione I tradizionali sistemi di governo delle imbarcazioni non realizzano funzioni di totale automazione della conduzione dell’imbarcazione tanto meno sono in grado di assumerne il comando in automatico a fronte di situazioni di elevata pericolosità, ma garantiscono solo la funzione di timoniere per il mantenimento di una rotta tramite il governo del solo timone.
Il Sistema in questione si differenzia da questi perché, mediante l’integrazione ed una completa elaborazione dei dati provenienti dai sistemi e dagli apparati di governo presenti a bordo predisposti allo scopo (meccanici, elettronici ed elettromeccanici), fornisce al comandante, in forma immediatamente comprensibile, tutte le informazioni di bordo intervenendo in automatico in situazioni di estremo pericolo relative a rischio di allagamento, incendio, collisione, incaglio.
In caso di inabilità del comandante rilevata automaticamente o dietro suo specifico comando, il sistema assume il governo dell’imbarcazione. In manovra e in navigazione governa considerando anche le distanze da ostacoli fissi ed in movimento, il fondale, le condizioni meteo, il carburante disponibile e le condizioni generali dell’imbarcazione fornendo in tempo reale tutti i dati relativi alla navigazione ad uno o più centri remoti predeterminati che utilizzano identica tecnologia ed adeguata configurazione con la possibilità di cedere il comando ad uno di questi se esplicitamente richiesto e preventivamente abilitato.
E’ prevista l’opzione del mantenimento del punto in caso di SOS in alternativa al mantenimento della rotta. Il sistema accetta la cessione del governo dell’imbarcazione da parte del comandante anche in condizione di non emergenza e in tal caso non attiva né il SOS né il centro remoto.
Il sistema diventa quindi uno strumento estremamente potente e sicuro a vantaggio del comandante, dell’armatore, delle società di servizi o di coloro che sono preposti al soccorso in mare ed ha lo scopo di rendere ogni viaggio in mare sicuro, ottimizzato e se del caso automatico, oltre a garantire in caso di necessità, un soccorso rapido e meno costoso.
FUNZIONI
Il sistema, integrando le funzioni degli apparati di governo propri dell’imbarcazione con le funzioni di supervisione, telecontrollo e telecomando degli stessi e di tutti gli altri sistemi di bordo, consente da un’unica postazione di provvedere alle seguenti funzioni principali:
a) acquisire tutte le informazioni riguardanti lo stato degli apparati e/o sistemi di bordo ( motori, invertitori, organi di trasmissione, timone, flaps, pompe di sentina, pompe di sentina di emergenza, serbatoi carburante, serbatoi acqua, alimentazione 12/24 Volts, 220 Volts, radar, radio, satellite, gps, gprs, eco scandaglio, stazione meteo, misuratori di correnti e di ostacoli telecamere di manovra, telecamera neurale per il riconoscimento degli ostacoli, gruppo elettrogeno, misuratori inclinazione longitudinale e laterale, telecamere interne, ancora, oblò, interruttori generali, ecc.); nonché lo stato del comandante relativamente alla posizione, condizione fisica ed immagine; e dei passeggeri relativamente alla posizione a bordo.
b) trasmettere tali informazioni al comandante (e al centro remoto se attivato) segnalando in tempo reale le condizioni di normalità, di criticità e di allarme di ciascun sistema e apparato di governo verificando la presa visione ed accettazione da parte del comandante;
c) eseguire normalmente i comandi e le istruzioni impartite dal comandante relativamente a tutti gli apparati necessari alla conduzione dell’imbarcazione/nave e alla gestione delle criticità e degli allarmi.
Modalità di esecuzione comandi (governo)
E’ possibile governare attraverso 6 tipologie di plancia:
1) Tradizionale (che funge anche da plancia di emergenza)
2) Tradizionale servita da PLC/PTC
3) Da Pannello (touch screen)
4) Mobile utilizzabile a bordo o a terra da P.C. portatile (touch screen)
5) Da centro remoto
6) Autopilota
Eseguire automaticamente le decisioni demandate all’automazione locale tramite le periferiche (PLC o PTC) quali fermo dell’imbarcazione in prossimità di ostacoli in rotta di collisione o di fondale insufficiente, svuotamento sentina standard e di emergenza, attivazione sistema antincendio, manovra uomo in mare. L’ Attivazione dell’autopilota secondo due modalità :
Di emergenza a seguito dell’inabilità del comandante Colombo o di imminente pericolo di collisione e/o incaglio prende il comando dell’imbarcazione. In base al tipo di evento, decide di lanciare o meno il SOS tradizionale EPIRB e comunica la situazione di emergenza al centro servizi remoto ove previsto. L’autopilota è in grado di compiere due tipologie di governo in base a come è stato preimpostato; la prima consiste nel continuare la navigazione fino alla meta con destinazione e rotta principale, destinazioni e rotte subordinate, di emergenza determinate dal comandante all’inizio della navigazione effettuando le correzioni necessarie ad evitare i pericoli imminenti; la seconda governare per il mantenimento del punto dove si è verificato l’allarme.
Il sistema, comandando gli attuatori, è in grado di governare i timoni, (le eliche di superficie i gruppi poppieri, gli idrogetti ecc.), i flaps, gli acceleratori dei motori, gli invertitori e, acquisendo in continuo i dati da DGPS, bussola direzionale cieca, radar, eco-scandaglio, stazione meteo, misuratore di rollio e beccheggio, misuratore di velocità, garantisce il raggiungimento del target impostato in modo ottimale, effettuando tutte le correzioni necessarie e prendendo ogni tipo di decisione in completa autonomia.
Ordinaria a seguito di esplicito ordine del comandante per il raggiungimento del target in modo ottimale.
d) comunicare via satellite per lanciare il S.O.S. EPIRB e con i centri servizi precedentemente allestiti con tecnologia compatibile permettendogli una supervisione continua della navigazione. Il sistema comunica anche, ove presente la copertura, con GPRS per comunicazioni di secondaria importanza;
e) cedere il governo dell’imbarcazione ad un Centro Servizi abilitato;
f) garantire la sicurezza dell’imbarcazione, del comandante e dei passeggeri a bordo;
g) registrare in continuo tutti i segnali, misure e comandi di bordo comprese le manovre impostate dal comandante realizzando la funzione di scatola nera in locale e trasmettendo a terra in tempo reale o in differita il contenuto della stessa.
CONFIGURAZIONE DEL SISTEMA
Il sistema per assolvere alle sue funzioni integra apparati elettronici e strumenti di misura e di regolazione a standard industriale marinizzati disponibili sul mercato e/o appositamente progettati e prodotti con i quali s’interfaccia ed interagisce.
• Centrale di controllo locale e remoto
La Centrale di Controllo, installata a bordo, identica a quella installata a terra presso uno o più centro servizi, è costituita da un elaboratore tipo PC Industriale con funzioni di CONCENTRATORE equipaggiato con sistema operativo Windows C.E. completamente configurabile che dispone di due o più video TOUCH SCREEN sui quali agisce lo specifico Software di telecontrollo ed automazione denominato COLOMBO. Il Concentratore è interfacciato e governa un numero variabile di Periferiche di Controllo tipo PLC o PTC (RTU proprietario), ad esso collegate tramite LAN, a cui è affidata anche l’automazione locale. Le Periferiche di Controllo (PLC o PTC) sono a loro volta collegate alla strumentazione di bordo, ai sensori e agli attuatori.
La Centrale di Controllo assolve alle funzioni di telecontrollo e telecomando in locale dell’imbarcazione riservando alle periferiche tipo PLC o PTC la soprintendenza autonoma di alcuni comandi di estrema emergenza la cui esecuzione e’ comunque monitorata dal concentratore. Le stesse funzioni del concentratore e delle periferiche possono essere comandate in remoto tramite collegamento Satellitare da identico centro installato a terra.
• Periferiche di controllo tipo PLC o PTC (RTU proprietario)
E’ un apparato a microprocessore con elevata resistenza alle scariche elettriche e alle condizioni ambientali e meccaniche. Può essere alimentata dalla tensione di rete, da batteria, è caratterizzata da un basso consumo. Per particolari tecnici si rimanda alla Monografia di Apparato.
• Funzionamento del Sistema
Le Periferiche di Controllo acquisiscono misure e segnali provenienti da tutti gli strumenti e dai sensori presenti all’origine o appositamente installati all’interno dell’imbarcazione/nave eseguendo automaticamente interrogazioni e ricevendo spontanee sullo stato di tutti i sistemi e apparati di bordo collegati e provvedono all’automazione locale. I dati acquisiti vengono trasmessi automaticamente al CONCENTRATORE e sono visualizzati, elaborati, memorizzati, graficizzati e, a richiesta stampati. Ad ogni anomalia riscontrata o ad ogni variazione di soglia prefissata, le Periferiche di controllo inviano spontaneamente la situazione di criticità e/o allarme al CONCENTRATORE. Gli allarmi vengono segnalati con avvisatori luminosi, acustici e opzionalmente vocali e vengono visualizzati sui monitor tipo touch screen che presenta a video la planimetria grafica dell’imbarcazione localizzando il tipo di allarme e la sua provenienza. Il Comandante in questo modo ha sempre la situazione sotto controllo e grazie alle informazioni acquisite, prende in ogni momento la decisione migliore, accettando o ignorando le proposte del SW applicativo COLOMBO, descritto più avanti, al fine del raggiungimento della meta e della sicurezza dell’equipaggio e delle persone a bordo. Il sistema sovraintende e registra la presa d’atto e le manovre del comandante, infatti, in base alle variazioni di stato degli organi di governo che il sistema comunica,il Comandante può adeguare e/o modificare le impostazioni iniziali di navigazione ottimizzando le risorse a sua disposizione anche in termini di tempo e di consumo e può gestire le eventuali situazioni di disagio o allarme che possono compromettere la vita a bordo o la sicurezza delle persone.
Il sistema, per le prestazioni specifiche del Software di automazione, telecontrollo e telecomando, COLOMBO, in assenza del Comandante, di suo impedimento, in caso di pericolo imminente o dietro suo specifico comando attiva la funzione autopilota. Gestisce autonomamente ogni tipo di criticità e/o allarme, inviando telecomandi alle periferiche PLC o PTC, laddove l’automazione non è gestita direttamente dalle stesse, per il funzionamento degli apparati e sistemi di bordo.
SOFTWARE DI AUTOMAZIONE E TELECONTROLLO
Il sistema Colombo prende il nome dall’elemento fondamentale che è lo specifico applicativo software di automazione delle manovre di imbarcazioni plananti e dislocanti. E’ stato sviluppato in ambiente Windows CE facendo uso delle più moderne tecnologie di progettazione del software che garantiscono affidabilità e prestazioni.
Si installa sul P.C. industriale della centrale di controllo di bordo e, attraverso uno o più apparati di telecontrollo tipo PLC o PTC, provvede, integrandole, alle due funzioni fondamentali del sistema:
– supervisione, telecontrollo e telecomando dell’intera imbarcazione;
– comando automatico dell’imbarcazione (autopilota)
L’applicativo COLOMBO si integra:
– con lo SCADA che costituisce l’interfaccia specifica con le periferiche di controllo mediante un apposito protocollo di comunicazione per lo scambio delle informazioni (polling, acquisizione spontanee, gestione allarmi, Data logging);
– con il NAVIGATORE per la gestione delle informazioni, l’invio di comandi, teleregolazioni, l’aggiornamento delle pagine grafiche rappresentative dei punti d’imbarcazione telecontrollati, per il comando automatico dell’imbarcazione (autopilota) . Il blocco funzione Navigatore è anche l’interfaccia verso i centri servizi remoti;
– con NAVCOM che costituisce il blocco comunicazioni con tutta la strumentazione, nautica e non, citata nella presente descrizione.
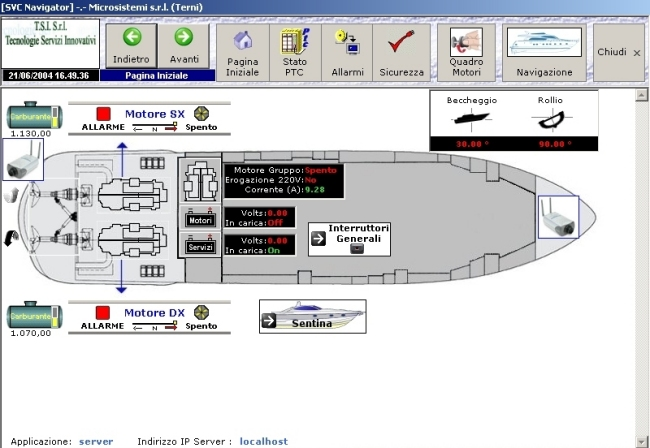
L’interazione con COLOMBO avviene attraverso touch screen di notevoli dimensioni, sul quale appaiono in un’unica schermata, in forma grafica e immediatamente interpretabile, le informazioni essenziali al controllo dello stato dell’imbarcazione ed al governo della stessa. Vengono monitorati i misuratori di livello dei serbatoi, i giri dei motori, la posizione degli invertitori, l’inclinazione dei flaps, l’orientamento del timone e così via. Attraverso il Touch Screen in forma immediata ed intuitiva è possibile governare l’imbarcazione in modo del tutto equivalente ai comandi tradizionali, realizzando in tal modo una plancia aggiuntiva. COLOMBO, gestisce in modo semplice ed efficace i passaggi da manuale ad automatico e viceversa, sospendendo, ad esempio, le funzioni di autopilota non appena rileva un intervento manuale sui comandi; realizza il passaggio in manuale in modalità autopilota ordinaria nel caso di carenza dei dati essenziali al governo automatico quali quelli provenienti dal DGPS.
Una notevole caratteristica di COLOMBO è infine quella di prevedere il governo remoto dell’imbarcazione. Attraverso un collegamento satellitare COLOMBO è in grado di agire da un computer remoto in modo equivalente a quando opera dal computer di bordo. In questa eventualità che di norma configura una situazione di emergenza, il computer remoto agisce come Master e si sostituisce a quello di bordo che viene considerato Slave, fino al ripristino della condizione ordinaria.
• Funzione di Supervisione,Telecontrollo e Telecomando
Tale funzione interessa l’intera imbarcazione ed agisce sui seguenti apparati e sistemi di bordo:
MOTORI PROVVEDENDO A:
• MISURARE il grado di accelerazione del motore, il livello, la pressione e la temperatura del liquido di raffreddamento e dell’olio, la temperatura dell’aria in sala macchine, la temperatura e la pressione del circuito di raffreddamento mare/motore, il livello di carica delle batterie di accensione motori, l’erogazione degli alternatori, la temperatura dei gas di scarico;
• COMANDARE l’accensione, l’accelerazione, la decelerazione e lo spegnimento dei motori (Riferimento TAVOLA: DISEGNO 5).
ORGANI DI TRASMISSIONE PROVVEDENDO A:
• MISURARE il livello, la pressione e la temperatura del liquido di raffreddamento (ove previsto) e dell’olio degli invertitori, la temperatura dell’aria in sala macchine, la temperatura e la pressione del circuito di raffreddamento mare/motore (ove previsto), la posizione degli invertitori relativamente alle posizioni di folle, marcia avanti, marcia indietro, la marcia avanti 1° e 2° inserita per gli invertitori che dispongono due marce avanti, lo stato di carica e delle batterie servizi (Volts, in carica on/off);
• COMANDARE gli invertitori relativamente alle posizioni di folle, marcia avanti, marcia indietro, ( selezionare la marcia avanti da inserire per gli invertitori che dispongono di più marce) (Riferimento TAVOLA: DISEGNO 6)
ORGANI DI COMANDO E MANOVRA PROVVEDENDO A:
• MISURARE la velocità dell’imbarcazione, il livello del carburante nei serbatoi, il consumo, istantaneo-medio e per periodo, del carburante con il calcolo dell’autonomia, l’equilibratura delle assi delle eliche;
• RILEVARE il grado di inclinazione longitudinale e laterale dell’imbarcazione, la posizione dei flaps, la posizione dei timoni o gruppi poppieri o trasmissione di superficie;
• COMANDARE gli acceleratori, il timone, i flaps, gli invertitori (avanti/folle/indietro) (Riferimento TAVOLA: DISEGNO 6).
GRUPPO ELETTROGENO PROVVEDENDO A:
• RILEVARE lo stato di acceso/spento;
• MISURARE il livello, la pressione e la temperatura del liquido di raffreddamento e dell’olio, la temperatura dell’aria in sala macchine, la temperatura e la pressione del circuito di raffreddamento mare/motore (ove previsto), la rete di alimentazione 220 on/off ;
• COMANDARE l’accensione del gruppo elettrogeno in caso di carica insufficiente batterie motori e servizi e/o richiesta di utilizzo 220 volts, l’accensione del gruppo elettrogeno, lo spegnimento del gruppo elettrogeno;
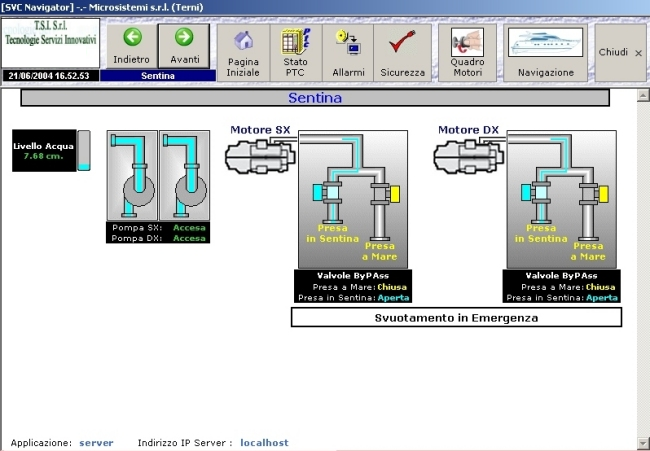
SENTINA PROVVEDENDO A:
• MISURARE il livello di acqua nella sentina;
• COMANDARE le pompe di sentina dx e sx in caso di necessita’ e le pompe di sentina di emergenza, regolando le valvole motorizzate delle prese a mare e di bypass prese a mare motore/sentina dx e sx. (Riferimento TAVOLA: DISEGNO 7.
STRUMENTI DI NAVIGAZIONE E MANOVRA PROVVEDENDO A :
• ACQUISIRE dati e MISURARE l’efficienza:
• del radar, della bussola direzionale, del segnale radio, del segnale satellitare DGPS, del segnale satellitare per le comunicazioni, del GPRS, dell’Eco-scandaglio, della Stazione meteo, delle telecamere neurali (gestione automatizzata della visualizzazione delle immagini per il riconoscimento ostacoli), delle telecamere di manovra, dei misuratori di distanza da ostacoli in direzione posteriore, anteriore, laterale, delle luci di via, dell’ancora, della passerella e delle cime;
• MISURARE le vibrazioni degli assi eliche;
• COMANDARE automaticamente l’attivazione delle comunicazioni disponibili;
SERVIZI DI BORDO PROVVEDENDO A:
• CONTROLLARE la sezione abitativa, lo stato delle telecamere interne, dell’illuminazione interna, del meteoclima interno, lo stato degli elettrodomestici e dell’autoclave, gli interruttori generali, 220V e 12/24 V, la presa di terra 220V, la presa da gruppo elettrogeno 220V,
• ESEGUIRE controlli incendio, allagamento, uomo in mare, lo stato del comandante, lo stato dell’equipaggio con la posizione dei passeggeri. (Riferimento TAVOLA: DISEGNO 8).
Tutto ciò che il sistema rileva o esegue viene restituito sul touch-screen della Centrale di Controllo. In qualsiasi fase dell’utilizzo del programma una eventuale situazione di criticità o allarme appare in modo automatico ed in tempo reale in sovrimpressione mostrando:
• Tipo di criticità o allarme
• provenienza
• data e ora della manifestazione di criticità o allarme
• stato di criticità o allarme
• intervento automatico in corso con il relativo stato
Il sistema provvede in automatico a gestire le criticità e gli allarmi e, in base alla tipologia di allarme provvede ad inviare telecomandi alle periferiche di controllo se diversi da quelli che le stesse eseguono in automazione locale e/o a trasmettere richieste di soccorso all’esterno.
• Funzione di Comando Automatico (Autopilota)
COLOMBO, interagendo con l’apparato di telecontrollo (tipo PLC o PTC), realizza la funzione di comando automatico dell’imbarcazione mediante:
• acquisizione dei dati provenienti dai sensori necessari alle diverse tipologie di manovra quali ad esempio stato del timone, marcia, numero di giri dei motori, misuratori di rollio e beccheggio, misuratore di velocità;
• acquisizione di tutti i dati messi a disposizione dal DGPS sul protocollo NMEA tra cui posizione e orientamento dell’imbarcazione, della tratta e dell’intera rotta da percorrere;
• Acquisizione dei dati meteorologici relativi alla direzione e velocità del vento, delle correnti marine e del moto ondoso provenienti dalla stazione meteo,
• Rilevamento degli ostacoli dal radar
• Rilevamento degli ostacoli dalla telecamera neurale
• Rilevamento degli ostacoli entro un massimo di 50 metri in manovra/navigazione provenienti dai sensori
• Rilevamento del fondale dall’ecoscandaglio;
• Rilevamento delle immagini in continuo da mettere a disposizione anche del centro remoto
• Invio dei comandi adeguati alla realizzazione delle manovre e della navigazione per le imbarcazioni dislocanti; di manovra planata e navigazione per le imbarcazioni plananti.
AGENDO direttamente sugli attuatori degli apparati di manovra e precisamente:
• Gli acceleratori dei motori destro e sinistro
• Gli invertitori destro e sinistro
• I timoni o (gruppi poppieri , trasmissione con eliche di superficie,idrogetti)
• I flaps.
raggiunge il target prestabilito.
CARATTERISTICHE DEL SISTEMA
Le caratteristiche che contraddistinguono il sistema sono:
• Affidabilità Totale : è praticamente impossibile che il verificarsi di malfunzionamenti possono rendere il sistema inutilizzabile, in quanto la ridondanza degli elementi e la loro qualità intrinseca rappresentano una formidabile barriera nei confronti dell’errore. Inoltre, il sistema è comunque in doppio (riserva calda) per quanto concerne il PC industriale, i PLC/PTC, i monitor ed ogni altro dispositivo ritenuto irrinunciabile; possono essere gestiti in doppio tutti gli strumenti elettronici necessari alla navigazione, sia in caso di governo del comandante assistito dai PLC/PTC sia in caso di pilota automatico (autopilota). Nel primo caso se si verifica la rottura di uno o più componenti citati viene sostituito in automatico dall’altro, comunicando al comandante l’evento, in caso di ulteriori e ripetuti guasti passa in modalità’ plancia tradizionale, nel secondo caso qualora le risorse disponibili lo consentano lancia gli SOS e se possibile mantiene il punto; qualora non fosse garantibile neanche quest’ultima condizione interrompe l’afflusso di carburante l’imbarcazione.
• Precisione : Colombo è caratterizzato da un grado di precisione straordinaria in manovra e in navigazione, impensabile da realizzare con il governo manuale dell’imbarcazione/nave. Esegue correzioni, ove necessario, in continuo, garantendo una precisione in manovra ed in navigazione, dell’ordine dei centimetri.
• Efficienza : il colloquio tra le periferiche di controllo e tra queste ed il Concentratore, garantisce il monitoraggio continuo dello stato dell’intero sistema, consentendo la segnalazione di possibili anomalie e fermi dei singoli sistemi e gestendo al meglio gli impianti per la durata della navigazione. Ogni problema viene immediatamente individuato, il sistema trasmette il messaggio al comandante, che viene messo così nelle condizioni di saper intervenire tempestivamente e in caso di emergenza assume comando e decisioni.
• Intelligenza Diagnostica : il Sistema è intelligente e in grado di autoaddestrarsi.
• Autonomia : il Sistema è alimentato con batterie 24 volts monitorate continuamente e ricaricate attraverso una corretta gestione di tutti i generatori.
• Chiarezza : il Sistema segnala in modo chiaro e differenziato, sia all’interno dell’imbarcazione sia all’esterno (centro servizi remoto) tutto ciò che accade a bordo in modo immediato. I tempi di risposta del sistema sono dell’ordine del centesimo di secondo.
• Automazione Totale : tutto il Sistema può funzionare in modo completamente automatico. Infatti, la facoltà decisionale è insita nel Sistema. La Centrale di Controllo è l’interfaccia uomo-macchina.
• Espandibilità: praticamente illimitata rispetto al campo di applicazione; la qualità del software, la modularità hardware unita alle elevatissime prestazioni consentono la gestione di un elevatissimo numero di segnali, misure e comandi di gran lunga superiore a quelli previsti e prevedibili a bordo.
Schema completo
Articolo pubblicato dalla rivista Barche a Motore nel n°3/2007 (Aprile)
Pagina iniziale
Sentina
Navigazione
